 Skip to content
Skip to content
Excerpt: The OpenClaw 3D printable robot arm is an open source project that is revolutionizing the approach to DIY robotics. We break down the assembly, capabilities, and practical applications of this innovative platform that is making advanced robotics accessible to everyone from hobbyists to educators.
1️⃣ What is OpenClaw 3D Printable Robot Arm and Why People Are Talking About It
The OpenClaw robotic arm represents a significant breakthrough in accessible robotics technology. This innovative project has captured the attention of makers, engineers, educators, and robotics enthusiasts worldwide, and for good reason. The OpenClaw 3D printable robot arm brings professional-grade robotic capabilities within reach of anyone with access to a 3D printer and basic electronics knowledge.
The remarkable thing about the OpenClaw robotic arm is that it democratizes robotics in ways that were previously unimaginable. Traditional industrial robot arms cost tens of thousands of dollars and require specialized knowledge to operate and maintain. The OpenClaw changes this equation entirely by providing designs that can be manufactured using consumer-grade 3D printers and readily available components. This shift has profound implications for education, prototyping, research, and hobbyist projects.
What makes the OpenClaw 3D printable robot arm particularly noteworthy is its intelligent design philosophy. Every component has been engineered to be manufacturable on desktop 3D printers while maintaining structural integrity and functional capability. The creators have invested tremendous effort into optimizing print times, material usage, and part compatibility, making the project approachable for makers of all skill levels.
The trend toward open source robotics reflects a broader movement in technology where transparency, collaboration, and accessibility are becoming increasingly valued. People are excited about the OpenClaw 3D printable robot arm because it represents this shift—it empowers users to understand, modify, and improve robotic systems rather than treating them as black boxes.
2️⃣ Architecture and Open Source Philosophy of OpenClaw 3D Printable Robot Arm
The OpenClaw open source robot is built on a foundation of transparency and community-driven development. The philosophy behind this project emphasizes that robotics knowledge and technology should be accessible to everyone, not gatekept by corporations or limited to wealthy institutions.
The architectural approach of the OpenClaw open source robot design reflects this philosophy at every level. The system is modular, meaning different components can be swapped, upgraded, or modified independently without requiring changes to the entire system. This modularity is crucial for an open source project because it allows contributors from around the world to work on different aspects simultaneously while maintaining compatibility.
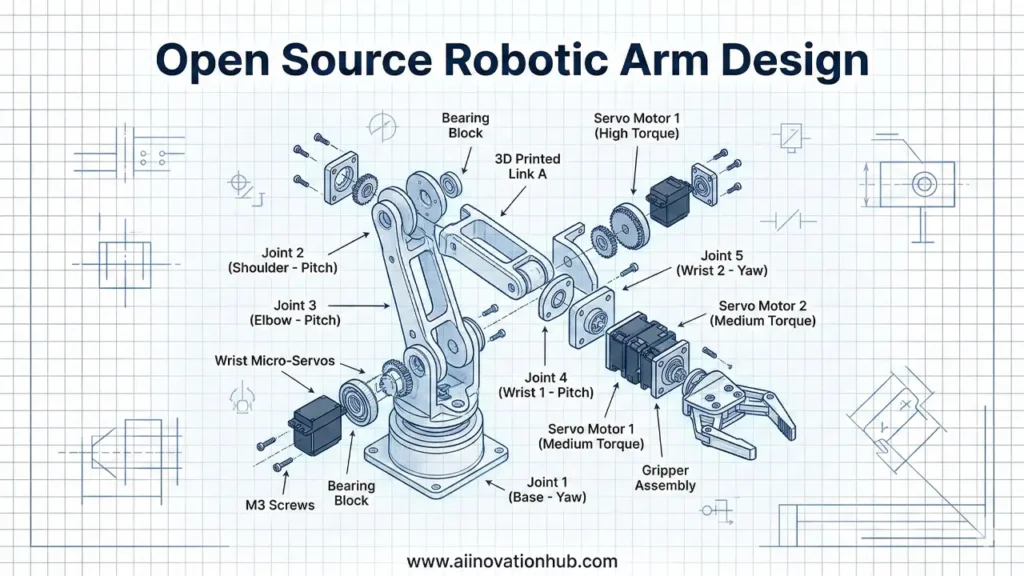
The structure of the OpenClaw open source robot comprises several key components that work together seamlessly. The main body consists of 3D-printed structural elements made from durable plastics like PLA or PETG. These parts provide the skeletal structure that defines the arm’s geometry and determines its range of motion. Metal rods and bearings are then incorporated to create joints that must withstand repeated use and handle loads efficiently.
One of the smartest aspects of the OpenClaw open source robot design is how it handles power distribution and control. Rather than creating a proprietary control system, the project integrates with standard electronics that are widely available and well-documented. This approach means users aren’t locked into specific vendors or components—they can work with hardware they’re already familiar with or can easily learn.
The community aspect of the OpenClaw open source robot cannot be overstated. Thousands of developers, makers, and roboticists contribute to improving designs, sharing modifications, documenting processes, and providing support to newcomers. This collaborative ecosystem ensures that the project continues evolving and improving based on real-world usage and feedback.
3️⃣ How the OpenClaw 3D Printable Robot Arm Mechanism Works
Understanding the mechanical principles behind the OpenClaw 3D printable robot arm helps appreciate why it’s such an elegant solution. The servo motor robot arm design demonstrates sophisticated engineering principles applied through surprisingly simple means.
At its core, the servo motor robot arm uses servo motors as the primary actuators. Servo motors are electric motors equipped with a built-in control circuit that allows precise positioning. When you send a signal to a servo motor, it rotates to a specific angle and holds that position, making servos ideal for robotic applications. The OpenClaw design typically incorporates multiple servo motors, with each one controlling a different degree of freedom in the arm’s movement.
The servo motor robot arm achieves its range of motion through a carefully designed kinematic chain. This means that the movement of one joint affects the positioning of all joints further down the arm. The mechanical advantage comes from the lever principles built into each joint. By optimizing the geometry of the connection points between servo motors and the 3D-printed structure, the designers ensure that each servo can effectively control heavy payloads without excessive power draw.
The servo motor robot arm mechanism works through a series of linked segments, similar to how a human arm functions. The base is fixed, typically to a platform or table. The first servo motor rotates the entire upper arm assembly. Subsequent servo motors control the movement of the forearm, wrist rotation, and gripper opening and closing. This hierarchical structure allows for complex movement patterns despite the relative simplicity of individual components.
What’s particularly impressive about the servo motor robot arm design is the efficiency of the mechanical advantage system. The 3D-printed structure includes carefully designed gear ratios and lever arms that multiply the torque produced by each servo motor. This means even modest servo motors can lift surprisingly substantial loads, and the movement is smooth and controllable.
The servo motor robot arm’s precision comes from the quality of the servo motors themselves and the accuracy of the 3D-printed components. Modern servo motors provide feedback about their actual position, which allows the control system to ensure the arm moves exactly where commanded. The tolerances maintained in the 3D printing process ensure that all moving parts align properly and move smoothly.

4️⃣ Assembly Process: DIY Experience with OpenClaw 3D Printable Robot Arm
Building your own DIY robot arm 3D print is an engaging and rewarding experience that teaches valuable skills while producing a functional device. The assembly process for the OpenClaw represents a sweet spot between complexity and accessibility—challenging enough to be interesting, but manageable for anyone with patience and attention to detail.
The first stage of the DIY robot arm 3D print project is acquiring all the necessary components. This involves downloading and preparing the 3D model files, gathering electronic components like servo motors and a control board, and obtaining hardware such as screws, bearings, and metal rods. Most enthusiasts find this stage straightforward, especially when detailed parts lists are provided with the project documentation.
The DIY robot arm 3D print process truly begins when you start the 3D printing phase. This is where patience becomes your greatest asset. Printing all the components can take anywhere from 40 to 100+ hours of printer time, depending on your specific configuration and printer speed. Experienced makers recommend spreading this across multiple print jobs to avoid tying up your printer for extended periods. The quality of these prints matters significantly for the final result, so settings like layer height, infill percentage, and print speed should be chosen carefully.
Once you have all the physical components in hand, the DIY robot arm 3D print assembly truly starts. The process involves carefully fitting each component together, testing for proper alignment, and making adjustments as needed. This stage teaches you about mechanical tolerances and how small variations can significantly impact functionality. Many builders document their process, creating useful guides for others attempting the DIY robot arm 3D print project.
The electronic assembly is where your DIY robot arm 3D print comes to life. This involves soldering connections between servo motors and the control board, programming the microcontroller, and calibrating each joint. For those new to electronics, this stage can be challenging but is an excellent learning opportunity. Most DIY robot arm 3D print projects provide detailed wiring diagrams and example code to guide you through this process.
Testing and troubleshooting form a crucial part of the DIY robot arm 3D print journey. Initially, you’ll likely need to adjust servo calibration, fine-tune movement speeds, and possibly reprint parts that don’t fit quite right. This iterative process is normal and expected. The beauty of the DIY robot arm 3D print approach is that you can make these modifications yourself, learning from each adjustment.
The entire DIY robot arm 3D print project, from printing to final assembly and testing, typically requires 40-60 hours of work spread over several weeks. This investment of time results not just in a functional robot, but in deep understanding of how it works and how to maintain and modify it.
5️⃣ Where to Download Files for OpenClaw 3D Printable Robot Arm
Finding the right OpenClaw GitHub files is essential for successfully building your project. GitHub has become the standard platform for sharing open source projects, and the OpenClaw files are typically hosted and maintained through repositories that are freely accessible to anyone.
The OpenClaw GitHub files contain everything needed for a complete build. These files include detailed 3D models in formats compatible with most slicing software, assembly documentation, electrical schematics, firmware code, and guides for calibration and operation. The repository structure is usually well-organized, making it easy to navigate and find exactly what you need.
When accessing OpenClaw GitHub files, you’ll typically find several important documents. The README file provides an overview of the project and quick-start instructions. The Bill of Materials (BOM) lists every component needed with specifications and suggested suppliers. The assembly guides include step-by-step instructions, often with photographs or diagrams showing how parts fit together.
The OpenClaw GitHub files also include the firmware and control software that makes the arm actually work. This software handles the complex task of coordinating multiple servo motors to create smooth, controlled movements. For users interested in customization, these files are fully accessible for modification, allowing you to adjust behavior, add new capabilities, or integrate with other systems.
One significant advantage of the OpenClaw GitHub files approach is version control and community contributions. As people build the arm and discover improvements, they can submit modifications back to the project. The main repository is updated to include these improvements, ensuring that anyone downloading the latest OpenClaw GitHub files gets the benefit of collective learning from the entire community.
The licensing of OpenClaw GitHub files typically allows for personal, educational, and commercial use with proper attribution. This flexibility has enabled schools to incorporate the project into curricula, entrepreneurs to develop products based on it, and hobbyists to build personal projects without legal concerns.
6️⃣ Design and Construction of OpenClaw 3D Printable Robot Arm
The open source robotic arm design philosophy emphasizes elegance, efficiency, and manufacturability. Every aspect of the OpenClaw has been carefully considered to balance functionality with the constraints of 3D printing technology.
The open source robotic arm design starts with the fundamental question: how can we create a robot that is capable, reliable, and printable on consumer equipment? This led to innovations in structural geometry. Rather than creating solid parts that would be heavy and require excessive print time, the designers developed hollow structures with internal ribbing that provides strength without unnecessary mass.
The open source robotic arm design incorporates several clever mechanical solutions. One key innovation is the use of printed bearings that work in conjunction with standard metal rods. These printed components reduce friction and wear while eliminating the need for expensive bearing assemblies. The design allows these printed elements to be easily replaced if they wear out, extending the overall lifespan of the arm.
Cable routing is another area where the open source robotic arm design excels. Many of the servo motors are not located at the joints they control. Instead, cables or linkages transmit the motion from motors positioned for better weight distribution to the joints that need to move. This distributed architecture prevents the arm from becoming top-heavy and improves overall stability.
The gripper mechanism of the open source robotic arm design is particularly noteworthy. The claw hand is intuitive to control and has been optimized to grasp objects of various shapes and sizes. The parallel jaw design—where two fingers move together—is mechanically simpler than anthropomorphic designs while being more practical for many real-world tasks.
Material selection for the open source robotic arm design is important. PLA filament is the most commonly used due to its easy printability and biodegradability. However, some users prefer PETG for its superior strength, or even more exotic materials like carbon fiber-reinforced nylon for specialized applications. The flexibility of the design allows builders to make material choices based on their specific needs.
The structural integrity of the open source robotic arm design has been validated through extensive testing by the community. Many builders publish load capacity tests and longevity reports, providing data on how much weight the arm can handle and how long printed components typically last before requiring replacement.
7️⃣ Educational Applications: OpenClaw 3D Printable Robot Arm as Learning Tool
The educational robot arm kit approach represented by OpenClaw is transforming how students learn about robotics, engineering, and programming. Educational institutions worldwide are recognizing the value of hands-on learning with affordable, accessible technology.
The educational robot arm kit model allows schools to introduce robotics without massive capital expenditure. A single school can set up a robotics lab with multiple OpenClaw arms for a fraction of the cost of traditional industrial robots. This democratization of robotics education reaches students who would otherwise never have the opportunity to work with advanced technology.
Using OpenClaw as an educational robot arm kit teaches students across multiple disciplines. Mechanical engineering students learn about kinematics, dynamics, and structural design. Electrical engineering students study servo control, power distribution, and circuit design. Computer science students work with embedded programming, algorithms, and real-time control systems. This interdisciplinary approach creates well-rounded engineers.
The educational robot arm kit approach emphasizes learning through doing. Rather than studying theory in isolation, students immediately apply concepts in practical projects. They quickly discover why certain design choices were made and how small changes affect performance. This experiential learning creates deeper understanding than traditional classroom instruction alone.
An educational robot arm kit like OpenClaw also teaches problem-solving and persistence. Students inevitably encounter challenges—a part doesn’t fit quite right, code doesn’t behave as expected, or a mechanism isn’t strong enough. Working through these problems develops critical thinking skills and builds confidence in tackling complex challenges.
The open source nature of the educational robot arm kit means students can explore the complete design and understand every aspect of how it works. They’re not told to trust that something works a certain way—they can examine the code, trace the mechanical linkages, and verify everything themselves. This transparency builds scientific thinking and intellectual honesty.
Many schools have successfully incorporated the educational robot arm kit into project-based curricula. Students design end-of-arm tooling for specialized tasks, program complex movement sequences, or compete in challenges where their robots must accomplish specific goals. These projects engage students deeply and produce impressive results that boost confidence and motivation.

8️⃣ Is OpenClaw 3D Printable Robot Arm Suitable for Beginners?
The question of whether this is a robotics project for beginners is nuanced. The honest answer is: it depends on your experience level and what “beginner” means to you.
If you’re completely new to 3D printing, electronics, and programming, the OpenClaw represents an ambitious but achievable first major project. Many people with no prior experience have successfully built one and learned tremendously in the process. The key is approaching it with patience and realistic expectations about the learning curve.
As a robotics project for beginners who have some 3D printing experience, the OpenClaw becomes significantly more manageable. If you already know how to use your printer, understand print settings, and can troubleshoot basic issues, you’re well-positioned for success. The 3D printing phase is typically the most time-consuming, so this experience reduces your overall timeline and frustration.
For people with basic electronics and programming background, this robotics project for beginners becomes quite straightforward. If you’ve worked with microcontrollers before or written code in any language, the firmware customization and servo control aspects become familiar challenges. Many find the electronics portion of this robotics project for beginners more rewarding than challenging.
The strength of OpenClaw as a robotics project for beginners is the extensive community support available. Online forums, YouTube build videos, and documentation from successful builders mean you’re never truly stuck. When you encounter problems, detailed solutions usually exist or community members are willing to help.
The most honest assessment: this robotics project for beginners works best when approached as a learning experience rather than a quick project. Budget 8-12 weeks for the complete build. Plan to learn 3D printing, soldering, basic electronics, and microcontroller programming. Accept that some parts might need reprinting. Approach problems as learning opportunities rather than obstacles. With these mindsets, beginners consistently succeed with this robotics project for beginners.
9️⃣ Economic Efficiency of OpenClaw 3D Printable Robot Arm
One of the most compelling arguments for building an affordable 3D printed robotics project like OpenClaw is the exceptional cost-effectiveness compared to alternatives.
An affordable 3D printed robotics platform like OpenClaw costs between $200-500 to build, depending on component choices and what you already own. This represents roughly 10-50% of the cost of comparable commercial collaborative robots. Even when you factor in the cost of 3D printer filament used in printing all the components, the economics remain compelling.
The affordable 3D printed robotics approach becomes even more cost-effective when building multiple units. If a school or organization builds five OpenClaw arms, the per-unit cost drops through economies of scale in purchasing components and spreading the design and documentation effort across multiple builds. Five OpenClaw units might cost $1500-2000 total, or $300-400 each—a fraction of commercial alternatives.
Beyond the initial build cost, affordable 3D printed robotics like OpenClaw offers advantages in serviceability and maintenance. If a 3D-printed component breaks, you reprint it for a few dollars in material. Replacement components for commercial robots often cost hundreds of dollars and require factory service. This accessibility to repairs significantly extends the useful life of an OpenClaw unit and reduces total cost of ownership.
The affordable 3D printed robotics philosophy also values distributed manufacturing. Rather than shipping robots globally, you print components locally. This reduces shipping costs, environmental impact, and supply chain dependencies. It also means spare parts can be created on-demand anywhere in the world.
An important consideration for affordable 3D printed robotics is the time investment. While the material cost is low, printing and assembling an OpenClaw requires significant human effort. Some organizations decide this is an excellent use of educational time—students learn valuable skills while building their tools. Others prefer to minimize time investment and accept higher monetary costs.
For hobbyists, educational institutions, and small companies, the affordable 3D printed robotics approach represented by OpenClaw is economically superior to commercial alternatives. The cost savings enable experimentation and multiple builds that would be impossible with traditional industrial equipment.
🔟 Final Verdict: Should You Build OpenClaw 3D Printable Robot Arm in 2026?
As we look toward 2026, the OpenClaw 3D printable robot arm project has matured significantly. The technology is proven, the community is vibrant, and the ecosystem of tools and documentation is comprehensive. The question isn’t whether OpenClaw is feasible—it’s whether it’s the right choice for your specific goals.
Build an OpenClaw if you want to learn robotics through hands-on experience with a system you fully understand and can modify. This project is perfect for engineering education, hobbyist exploration, and research prototyping. The learning value is exceptional, and building something functional with your own hands creates motivation and engagement that theoretical learning cannot match.
Build an OpenClaw if you need affordable robotic capability for specialized tasks. Custom end-of-arm tooling, unconventional work environments, or niche applications—the flexibility of an open source system shines here. You can tailor the hardware and software to exactly match your requirements rather than fitting your needs to commercial off-the-shelf constraints.
Build an OpenClaw if you’re part of an educational institution seeking to democratize access to advanced technology. The cost-effectiveness, accessibility, and learning opportunities make it an excellent choice for schools, universities, and training programs. Students engage deeply with systems they understand completely, and the projects they create demonstrate real skills to future employers.
Consider alternatives if you need industrial-grade reliability and support from a vendor. While the OpenClaw is capable and reliable within its design parameters, commercial robots come with warranties, technical support, and service agreements that may be essential for critical applications. For industrial manufacturing or high-stakes applications, these guarantees matter.
Consider alternatives if time pressure is critical. The OpenClaw requires substantial print time and assembly effort. If you need a working robot immediately, purchasing a commercial solution makes sense. If you have weeks to invest, OpenClaw is superior.
The verdict for 2026: The OpenClaw 3D printable robot arm is more accessible, better documented, and more capable than ever before. The community is active and supportive. The technology is proven and continuously improving. If your goals align with learning, customization, affordability, and flexibility, the OpenClaw represents exceptional value. The time to build one has never been better.
Whether you’re a student discovering robotics for the first time, an educator seeking to transform your classroom, a researcher prototyping new ideas, or a maker pursuing an ambitious project, the OpenClaw 3D printable robot arm offers genuine opportunity. The materials exist, the knowledge is available, the community is welcoming. The only question is whether you’re ready to take on this rewarding challenge.
If you’re serious about building the OpenClaw robot arm, the right 3D printer makes all the difference. Precision, reliability, and material compatibility directly impact performance. Explore the best machines for robotics projects at https://bestchina3dprinters.com/ and choose a printer that turns your ideas into working engineering reality.
Discover more from AI Innovation Hub
Subscribe to get the latest posts sent to your email.
